




الکتروموتور چیست؟
الکتروموتور یا موتور الکتریکی دستگاهی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند. این دستگاهها بر اساس قوانین الکترومغناطیسی عمل کرده و از یک میدان مغناطیسی برای ایجاد حرکت استفاده میکنند. الکتروموتورها در انواع و اندازههای متنوعی تولید میشوند و برای کاربردهای مختلف از دستگاههای کوچک خانگی گرفته تا ماشینآلات سنگین صنعتی مورد استفاده قرار میگیرند.
الکتروموتورها به دلیل کارایی بالا، هزینه نگهداری پایین و عمر طولانی، در بسیاری از صنایع جایگاه ویژهای دارند. برای مثال، موتور الکتریکی میتواند با بازدهی بیش از ۹۰ درصد کار کند و طول عمر متوسط آنها معمولاً بین ۱۵ تا ۲۰ سال است. همچنین، الکتروموتورها میتوانند تا ۲۰۰ نیوتنمتر و حتی بیشتر از آن، برای کاربردهای سنگین صنعتی گشتاور تولید کنند.
فروش انواع الکتروموتور
در بازار، انواع مختلفی از الکتروموتورها موجود است که هر کدام بر اساس نیازهای خاصی طراحی و تولید میشوند. از موتورهای کوچک و کممصرف که در دستگاههای الکترونیکی و خانگی استفاده میشوند تا موتورهای بزرگ و قدرتمند که در صنایع سنگین و ماشینآلات صنعتی به کار میروند، همه در دستهبندیهای مختلفی قرار میگیرند.
انتخاب صحیح الکتروموتور میتواند بر اساس عوامل مختلفی مانند توان موردنیاز (معمولاً از چند وات تا چند مگاوات)، نوع کاربرد، شرایط محیطی و میزان مصرف انرژی باشد. بهعنوانمثال، موتورهای کوچک خانگی ممکن است توانی بین ۵۰ تا ۵۰۰ وات داشته باشند، درحالیکه موتورهای صنعتی میتوانند توانی بیش از ۱۰۰ کیلووات داشته باشند. به همین دلیل، فروشگاهها و تأمینکنندگان معتبر با ارائه مشاورههای فنی و تخصصی به مشتریان، به آنها کمک میکنند تا بهترین و مناسبترین الکتروموتور را برای نیازهای خود انتخاب کنند.
انواع موتور الکتریکی
با بیش از 90 درصد بازدهی، موتورهای الکتریکی به انواع مختلفی از جمله موتورهای DC، موتورهای AC، الکتروموتورهای پلهای و موتورهای خاص تقسیم میشوند.
-
موتور DC
موتورهای DC بخاطر داشتن ساختاری ساده و قابلیت کنترل دقیق سرعت، یکی از محبوبترین انواع موتورهای الکتریکی هستند. این موتورها با جریان مستقیم کار میکنند و به دو دسته اصلی جاروبکدار و بدون جاروبک تقسیم میشوند. موتورهای جاروبکدار به دلیل سادگی ساختار و کمهزینه بودن، در کاربردهای کوچک و کمبار استفاده میشوند.
موتورهای بدون جاروبک DC، با حذف جاروبکها و کموتاتور، عملکرد بهتر و عمر طولانیتری دارند. این موتورها در کاربردهایی که نیاز به کارکرد مداوم و بدون وقفه دارند، مانند رباتیک، درایوهای دقیق و دستگاههای پزشکی استفاده میشوند. بهعنوانمثال، موتورهای بدون جاروبک میتوانند با سرعتهایی بین ۱۰,۰۰۰ تا ۲۰,۰۰۰ دور در دقیقه کار کرده و گشتاور بالایی تولید کنند.
-
موتور AC
موتورهای AC به دلیل کارایی و دوام بالا ، بیشتر در صنایع بزرگ و کاربردهای عمومی استفاده میشوند. این موتورها با جریان متناوب کار میکنند و به دو نوع اصلی سنکرون و آسنکرون تقسیم میشوند. موتورهای سنکرون در بارهای مختلف سرعت ثابتی دارند و به همین دلیل برای دستگاههایی مانند ژنراتورها و پمپهای بزرگ مناسب هستند.
موتورهای آسنکرون یا القایی، به دلیل ساختار ساده و کمهزینه بودن، محبوبیت بیشتری دارند. این موتورها در انواع مختلف ماشینآلات صنعتی و خانگی استفاده میشوند. بهعنوانمثال، موتورهای آسنکرون میتوانند با توانهایی از چند کیلووات تا چند مگاوات کار کنند و دارای بازدهی بالای ۹۰ درصد هستند.
الکتروموتورهای پلهای
الکتروموتورهای پلهای یا استپرموتورها برای کنترل دقیق موقعیت و حرکت طراحی شدهاند. این موتورها به صورت گامبهگام حرکت میکنند و هر پله نشاندهنده حرکت بر یک مسیر دقیق است. به همین دلیل، الکتروموتورهای پلهای در کاربردهایی مانند رباتیک، چاپگرها و دستگاههای CNC بکار میروند .

الکتروموتورهای پلهای با ارسال پالسهای الکتریکی به سیمپیچها، موقعیت دقیق را کنترل میکنند. این موتورها میتوانند یک حرکت خاص را بدون هیچگونه خطا یا انحرافی تکرار کنند که این ویژگی آنها را برای کاربردهایی که نیاز به کنترل دقیق و حرکتهای کوچک دارد، مناسب میسازد. برای مثال، دقت حرکت این موتورها میتواند به ۰.۰۱ درجه برسد که برای کارهای حساس و دقیق ایدهآل است.
موتورهای خاص
این موتورها برای کاربردهای ویژه و شرایط خاص طراحی شدهاند. موتورهای خاص شامل موتورهای خطی، موتورهای سروو و موتورهای توربینی هستند. موتورهای خطی برای حرکتهای خطی مستقیم، موتورهای سروو برای کنترل دقیق سرعت و موقعیت و موتورهای توربینی برای تولید قدرت زیاد با حجم کوچک و وزن کم استفاده میشوند
هر یک از این موتورهای خاص ویژگیها و کاربردهای منحصربهفردی دارند که آنها را برای شرایط خاص مناسب میسازد. بهعنوانمثال، موتورهای خطی میتوانند نیرویی تا ۵۰۰ نیوتن و حتی بیشتر تولید کنند. موتورهای سروو در رباتیک و سیستمهای کنترل دقیق به کار میروند و دقت موقعیت آنها میتواند به ۰.۱ میلیمتر برسد. موتورهای توربینی نیز در صنایع هوایی و تولید برق استفاده میشوند و قادر به تولید توانهای بسیار بالا در اندازه کوچک هستند.
انواع الکتروموتور بر اساس فاز
آیا میدانستید که الکتروموتورهای تک فاز و سه فاز میتوانند تفاوت چشمگیری در کارایی و مصرف انرژی داشته باشند؟ بیایید با هم به بررسی این دو نوع الکتروموتور و کاربردهای مختلف آنها بپردازیم.

الکتروموتور تکفاز
این الکتروموتورها با یک فاز جریان متناوب کار میکنند و به دلیل کمهزینه بودن و سادگی در نصب، برای کاربردهای خانگی و تجاری سبک ایدئال هستند. این موتورها معمولاً توانی بین ۵۰ تا 3000 وات دارند و میتوانند در ولتاژهای ۱۱۰ یا ۲۲۰ ولت کار کنند. این الکتروموتوها در انواع وسایل خانگی مانند پنکهها، پمپهای آب و ماشینهای لباسشویی مورد استفاده قرار میگیرند. بااینحال، توان این موتورها نسبت به موتورهای سهفاز محدودتر است و برای کاربردهای سنگین مناسب نیستند.

الکتروموتور سهفاز
الکتروموتورهای سهفاز بیشتر در صنایع بزرگ و کاربردهای سنگین استفاده میشوند. این موتورها با استفاده از سه فاز جریان متناوب کار میکنند و به دلیل کارایی و توان تولیدی بالا، در ماشینآلات صنعتی، کمپرسورها و پمپهای بزرگ استفاده میشوند. موتورهای سهفاز از نظر راندمان و کارایی بسیار بهتر از موتورهای تکفاز هستند.
الکتروموتورهای سهفاز به دلیل توزیع یکنواخت بار و کاهش ارتعاشات و نوسانات، عمر طولانیتر و کارایی بالاتری دارند. این موتورها معمولاً توانی بین ۱ کیلووات تا چند مگاوات دارند و در ولتاژهای ۳۸۰ ولت و بالاتر کار میکنند. الکتروموتورهای سهفاز برای کاربردهای صنعتی و سنگین مانند خطوط تولید، سیستمهای تهویهمطبوع و تجهیزات حملونقل بسیار مناسب هستند.
انواع الکتروموتور
الکتروموتورها به عنوان قلب تپنده ماشینآلات صنعتی و خانگی، در انواع مختلفی همچون الکتروموتور معمولی، ضد انفجار، کولری، دالاندر و دریایی طراحی و تولید میشوند.
-
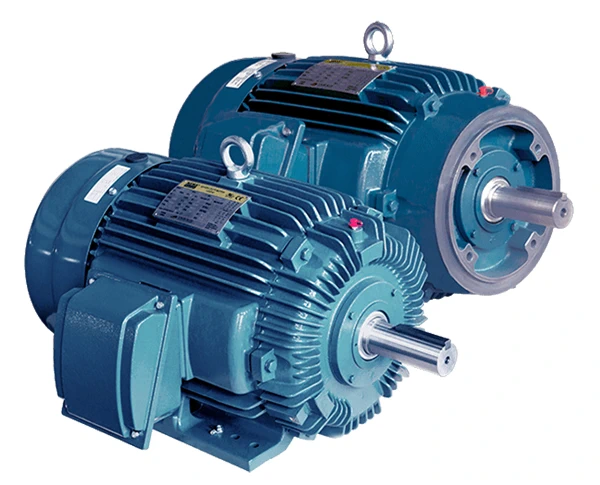
الکتروموتور معمولی
الکتروموتورهای معمولی به دلیل سادگی در نصب و نگهداری، یکی از پرکاربردترین انواع موتورهای الکتریکی هستند. بهعنوانمثال، یک الکتروموتور معمولی میتواند توانی بین ۱۰۰ وات تا چند مگاوات داشته باشد. این موتورها در انواع مختلفی از جمله موتورهای تکفاز و سهفاز تولید میشوند و برای کاربردهای سبک و سنگین مانند تهویهمطبوع و ابزارهای برقی مناسب هستند.
-
الکتروموتور ضد انفجار
الکتروموتورهای ضد انفجار با رعایت استانداردهای بینالمللی و استفاده از مواد مقاوم در برابر حرارت و فشار، ایمنی بالایی را فراهم میکنند. این موتورها از ایجاد جرقه و اشتعال در محیط کار جلوگیری کرده و معمولاً در محدوده توان ۰.۵ تا ۵۰۰ کیلووات تولید میشوند و میتوانند در محیطهایی با دمای ۵۰- تا ۸۰+ درجه سانتیگراد کار کنند. استفاده از این موتورها در محیطهای خطرناک، خطرات جانی و مالی را به حداقل میرساند.
-
الکتروموتور کولری
این الکتروموتورها کمصدا و کممصرف بوده و طولعمر بالایی دارند، به همین دلیل برای استفاده در کولرهای آبی بسیار مناسب هستند. این موتورها معمولاً توانی بین ۱۰۰ تا ۵۰۰ وات دارند و میتوانند در ولتاژهای ۲۲۰ تا ۲۴۰ ولت کار کنند. استفاده از الکتروموتورهای کولری میتواند به بهبود کیفیت تهویه و کاهش هزینه کمک کند.

-
الکتروموتور دالاندر
الکتروموتورهای دالاندر یا دوسرعته به دلیل قابلیت تنظیم سرعت، برای کاربردهایی که نیاز به تغییر سرعت در زمانهای مختلف دارند، بسیار مناسب هستند. الکتروموتورهای دالاندر معمولاً توانی بین ۰.۷۵ تا ۵۵ کیلووات دارند و میتوانند سرعتهایی بین ۷۵۰ تا ۳۰۰۰ دور در دقیقه داشته باشند. این موتورها در صنایعی مانند تولید، بستهبندی و تهویهمطبوع کاربرد گستردهای دارند.
-
الکتروموتور دریایی
الکتروموتورهای دریایی با ویژگیهایی مانند مقاومت در برابر زنگزدگی، مقاومت در برابر خوردگی و آب شور، توان بالا و کارایی در شرایط سخت، برای کاربردهای دریایی ایدئال هستند. این موتورها معمولاً توانی بین ۱ تا ۵۰۰ کیلووات دارند و در ولتاژ ۴۰۰ ولت به بالا کار کنند. استفاده از الکتروموتورهای دریایی میتواند به افزایش عمر تجهیزات و کاهش هزینههای نگهداری کمک کند.
مقایسه انواع الکتروموتور (موتور الکتریکی)
الکتروموتورهای معمولی به دلیل ساختار ساده و کمهزینه بودن، در بسیاری از کاربردهای صنعتی و خانگی مورد استفاده قرار میگیرند. این موتورها معمولاً بازدهی خوبی دارند و در شرایط عادی عملکرد پایدار و قابل قبولی ارائه میدهند. در مقابل، الکتروموتورهای ضد انفجار برای استفاده در محیطهای خطرناک طراحی شدهاند و با استفاده از مواد و فناوریهای خاص، از ایجاد جرقه و خطر انفجار جلوگیری میکنند. این موتورها معمولاً در صنایع نفت، گاز و شیمیایی مورد استفاده قرار میگیرند و از استانداردهای بینالمللی سختگیرانهای پیروی میکنند.
الکتروموتورهای کولری به دلیل مقاومت در برابر رطوبت و گرما، برای استفاده در سیستمهای تهویه مطبوع و کولرهای آبی ایدئال هستند. این موتورها معمولاً دارای پوششهای ضدزنگ و ضدخوردگی هستند تا در محیطهای مرطوب و گرم عملکرد مطلوبی داشته باشند. الکتروموتورهای دالاندر که دارای دو سیمپیچ هستند، امکان تغییر سرعت موتور را فراهم میکنند و برای کاربردهایی که نیاز به تغییر سرعت دارند، مانند ماشینآلات تولیدی، مناسب هستند. الکتروموتورهای دریایی نیز با طراحی ویژهای که در برابر شرایط سخت دریایی مانند نمک و رطوبت بالا مقاوم است، برای استفاده در کشتیها و تجهیزات دریایی مناسباند.
کاربرد الکتروموتورها
ماشینآلات صنعتی و خطوط تولید تا ابزارهای خانگی و وسایل نقلیه الکتریکی، همه به نوعی از الکتروموتورها بهره میبرند. در صنایع خودروسازی، الکتروموتورها در خودروهای الکتریکی و هیبریدی استفاده میشوند. همچنین در تجهیزات پزشکی، رباتیک، هوافضا و بسیاری از کاربردهای دیگر مورد استفاده قرار میگیرند. به عنوان مثال، موتورهای سروو در تجهیزات پزشکی برای کنترل دقیق موقعیت و حرکت استفاده میشوند و دقت آنها میتواند تا ۰.۱ میلیمتر باشد.
در صنایع نفت و گاز از موتورهای ضد انفجار و در سیستمهای تهویه مطبوع و تهویه صنعتی، از انواع مختلف الکتروموتورها استفاده میشود. استفاده از الکتروموتورها در این صنایع به بهبود کارایی، کاهش هزینهی انرژی و افزایش ایمنی کمک میکند. برای مثال، موتورهای تهویه مطبوع بازدهی بالای ۹۰ درصد دارند و هزینهی انرژی را به طور قابل توجهی کاهش میدهند.
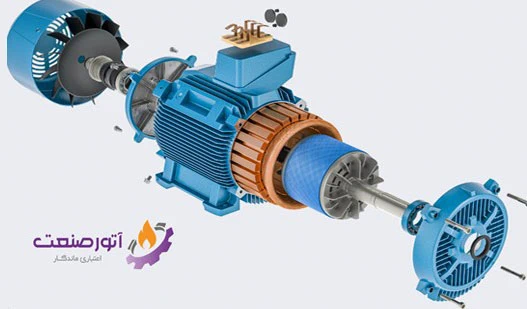
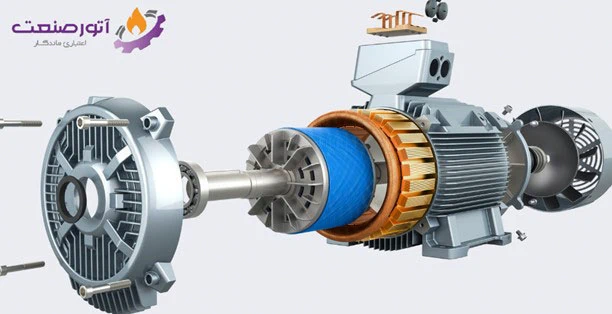
اجزا موتور الکتریکی
-
استاتور (Stator)
بخش ثابت موتور
شامل سیمپیچها یا آهنرباهای دائمی برای ایجاد میدان مغناطیسی
ساخته شده از لایههای نازک فولاد سیلیکونی برای کاهش تلفات جریان گردابی و افزایش کارایی
-
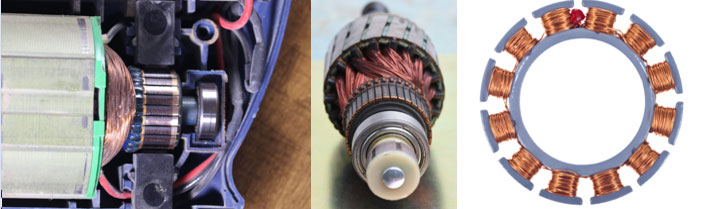
روتور (Rotor)
بخش چرخشی موتور
قرار گرفته در داخل استاتور
میتواند به صورت قفسی (در موتورهای قفس سنجابی) یا سیمپیچدار باشد
میدان مغناطیسی استاتور جریان الکتریکی را در روتور القا میکند و باعث ایجاد گشتاور و چرخش آن میشود
-
سیمپیچها (Windings)
پیچیده شده بر روی استاتور یا روتور
هدایت جریان الکتریکی
معمولاً از مس یا آلومینیوم با عایقبندی مناسب ساخته میشوند
- جاروبکها و کموتاتور (Brushes and Commutator) در موتورهای DC
انتقال جریان الکتریکی به سیمپیچهای روتور
جاروبکها از جنس کربن یا گرافیت برای خاصیت رسانایی خوب و دوام بالا ساخته میشوند
- بلبرینگها (Bearings)
حمایت از روتور و کاهش اصطکاک بین قطعات چرخان و ثابت
ساخته شده از مواد مقاوم در برابر سایش و حرارت برای تضمین عمر طولانی و عملکرد پایدار موتور
- بدنه (Frame)
محافظت از اجزای داخلی موتور
فراهم آوردن استحکام ساختاری و دفع حرارت
نحوه انتخاب الکتروموتور
اولین گام در این فرآیند، تعیین توان مورد نیاز موتور است که باید با توجه به بار مکانیکی و نوع کاربری محاسبه شود. توان موتور معمولاً به صورت اسب بخار (HP) یا کیلووات (kW) بیان میشود. علاوه بر توان، سرعت موتور نیز باید مورد توجه قرار گیرد، که به صورت دور در دقیقه (RPM) مشخص میشود. نوع بار (ثابت یا متغیر)، شرایط محیطی (مانند دما، رطوبت و وجود مواد خورنده) و نیاز به کنترل سرعت از دیگر فاکتورهای مهم در انتخاب موتور هستند. برای کاربردهایی که نیاز به تغییر سرعت دارند، استفاده از موتورهای قابل تنظیم یا موتورهایی که درایوهای فرکانس متغیر (VFD) دارند میتواند مناسب باشد.
از دیگر فاکتورهای مهم، انتخاب بین موتورهای تک فاز و سه فاز است. موتورهای تک فاز برای کاربردهای خانگی و تجاری کوچک مناسباند، در حالی که موتورهای سه فاز به دلیل کارایی و قدرت بالاتر، در صنایع بزرگ و کاربردهای سنگین استفاده میشوند. همچنین، نوع حفاظت موتور نیز باید با توجه به محیط کاری انتخاب شود. مثلاً، در محیطهای خطرناک نیاز به استفاده از موتورهای ضد انفجار است. نکته دیگر انتخاب جنس مواد سازنده و نوع سیمپیچها است که باید با توجه به شرایط محیطی و نیاز به دفع حرارت مناسب باشد. نهایتاً، توجه به مشخصات فنی مانند گشتاور، راندمان و نگهداری و تعمیرات منظم میتواند در افزایش عمر و کارایی موتور تأثیرگذار باشد. انتخاب صحیح الکتروموتور نه تنها به بهبود عملکرد سیستم کمک میکند، بلکه میتواند هزینهی انرژی و نگهداری را نیز کاهش دهد.
نقد و بررسی در "الکتروموتور"